����
���M(j��n)늙C��Ҋ(ji��n)�G��ԭ���������Q����---TMC5160/TMC4361
||
��һЩ�Ԅ�(d��ng)�����I(l��ng)���������M(j��n)늙C��ʹ����ռ��(zh��)�ஔ��ı��������M(j��n)늙C�c��(d��ng)�·�M�ɵ��_(k��i)�h(hu��n)����ϵ�y��
���了(ji��n)�εĽY���������ăr(ji��)��Ϳɿ���������Ŀǰ���ںܶ��ИI(y��)�У����I(y��)�Ԅ�(d��ng)�����t���Ԅ�(d��ng)���������Ԅ�(d��ng)���ȣ��V��������
���M(j��n)늙C��(j��ng)�����������_��λ�Ĉ�(ch��ng)����������C늙C���l(f��)��ʧ�����P(gu��n)��Ҫ��
������{ԇ�^(gu��)���Е�(hu�� )�l(f��)�F���M(j��n)늙C�G�������D�Ͷ�λ���ʬF���������@�N��r��Ҫ��(zh��)����
����Ҫ���ֱ�ӷ����x�����M(j��n)늙C��һ��Ҫ���o�^(gu��n)��������Fԓ�F���ԭ�����ɴ��ҳ���Q֮����
���M(j��n)늙C�āG������λ������һ����������ԭ������
1�� ��׃����r(sh��)�G�}�_�����F�����κ�һ��(g��)��������һ��׃�������Ӌƫ�������ҴΔ�Խ��ƫ��Խ����
2�� ����(d��ng)�ٶ�̫�������ٶ�̫���������G����
3�� ����ͬ�����Ĉ�(ch��ng)��ܛ���a��̫���̫����
4�� ���M(j��n)늄�(d��ng)�C�����Ĺ����D�ز������](m��i)������������(l��i)��(d��ng)ؓ�d��
5�� �������ܸɔ_�����`��(d��ng)����
6�� ��(d��ng)���ܸɔ_������
7�� ܛ��ȱ����
ᘌ����φ�(w��n)�}�������£�
1��һ������M(j��n)��(d��ng)����������}�_��̖����һ����Ҫ�����磺������̖�ڵ�һ��(g��)�}�_�����ػ��½��أ���ͬ����(d��ng)��Ҫ��һ�ӣ�����(l��i)ǰ���뱻�_����
��t��(hu�� )��һ��(g��)�}�_���\�D�ĽǶ��c��(sh��)�H��Ҫ���D���෴�������ϬF����F��Խ��Խƫ������ԽСԽ���@����Q�k����Ҫ��ܛ����׃�l(f��)�}�_��߉����ӕr(sh��)��
2�����ڲ��M(j��n)늙C���c(di��n)�Q�����ٶȲ���̫�������䎧��ؓ�d�T���^����r��,���h���ٶ���1r/s������
�@�ӛ_���^С��ͬ�Ӽ��ٶ�̫��ϵ�y�_��Ҳ���������^(gu��)�_�����¶�λ����;늙C���D�ͷ��D֮�g����һ���ĕ�ͣ�r(sh��)�g,���](m��i)�о͕�(hu�� )������ٶ�̫�������^(gu��)�_��
3��������(sh��)�H��r�{����������ֵ�������ͬ����������׃�^�������Ը�׃����r(sh��)���һ�����a������
4���m���������R�_����������(d��ng)��늉���ע���x����(d��ng)������(d��ng)оƬ���xŤ�ش�һЩ���R�_��
5��ϵ�y�ĸɔ_�������������(d��ng)�����`��(d��ng)�����҂�ֻ�����k���ҳ��ɔ_Դ��
������ɔ_���������������Ӵ��g�����x�ȣ����Д�����;������������Ŀ��ɔ_������
��Ҋ(ji��n)��ʩ��
�����p�y���ξ�(xi��n)������ͨ����(xi��n)��ϵ�y����̖��(xi��n)�c��������늉�׃������(xi��n)���_(k��i)����(xi��n)������늴Ÿɔ_������
�����Դ�V�����с�(l��i)��늾W(w��ng)�ĸɔ_���V�����ڗl���S���¸�������O���ݔ��˼��Դ�V����������ϵ�y�ȸ��O��֮�g�ĸɔ_��
���O��֮�g����ù�늸��x�����M(j��n)����̖�������ڗl���S�������}�_�ͷ�����̖����ò�ַ�ʽ�ӹ�늸��x�M(j��n)����̖������
�ڸ���ؓ�d����늴��^�����늴��y���ɶ˼��������ջ����й���·������ؓ�d���_(k��i)�^˲�g�ܮa(ch��n)��10~100���ļ��늉�����������l����20KHZ������
6��ܛ����һЩ���e̎�����Ѹɔ_����(l��i)Ӱ�������
ͬ�r(sh��)߀����������ԭ��
ԭ��һ��
�D�ӵļ��ٶ����Ӳ��M(j��n)늙C�����D�ň�(ch��ng)�������ړQ���ٶȕr(sh��)�����M(j��n)늙C��(hu�� )�a(ch��n)���G����
�@�����ݔ��늙C����ܲ������ڲ��M(j��n)늙C�Юa(ch��n)����ͬ�����؟o(w��)��ʹ�D���ٶȸ��S���Ӵň�(ch��ng)�����D�ٶ����Ķ������G����
��Q������
������ʹ���M(j��n)늙C�����a(ch��n)����늴��D����������˿����~������������m���Ӵ���(d��ng)���;�����ڸ��l�����D�ز���r(sh��)�����m�������(d��ng)�·����(d��ng)늉�;Ҳ���Ը����D�ش�IJ��M(j��n)늙C����
������ʹ���M(j��n)늙C��Ҫ�˷����D�pС����˿��m������늄�(d��ng)�C�\���l�����Ա����늙C��ݔ���D����
ԭ�����
���M(j��n)늙C������ؓ�d���ڑT�������ڲ��M(j��n)늙C����������ؓ�d���ڑT����ʹ��늙C�ڹ����^(gu��)���в�����������(d��ng)��ֹͣ������������(d��ng)�r(sh��)���F�G������ֹͣ�r(sh��)�l(f��)��Խ����
��Q������
����ͨ�^(gu��)һ��(g��)���ٺ͜p���^(gu��)���������^�͵��ٶ�����(d��ng)��������u���ٵ�ijһ�ٶ��\��������u�p��ֱ��ֹͣ��
ԭ���������M(j��n)늄�(d��ng)�C�a(ch��n)������
����Ҳ�������G����һ��(g��)ԭ�������M(j��n)늙C̎���B�m�\�Р�B(t��i)�r(sh��)����������}�_���l�ʵ��ڲ��M(j��n)늙C�Ĺ����l�������a(ch��n)��������
������Q������
����һ���m���pС���M(j��n)늙C����(d��ng)���;
�����������ü�����(d��ng)����;
���������������᷽���������Cе���ᷨ��
�������Ϸ���������Ч����늙C��ʎ������G���F��l(f��)����
���Л](m��i)��һ��M(j��n)��(d��ng)оƬ����?x��n)Ȳ������㷨�?l��i)��(y��u)��늙C��������ֹ�G������
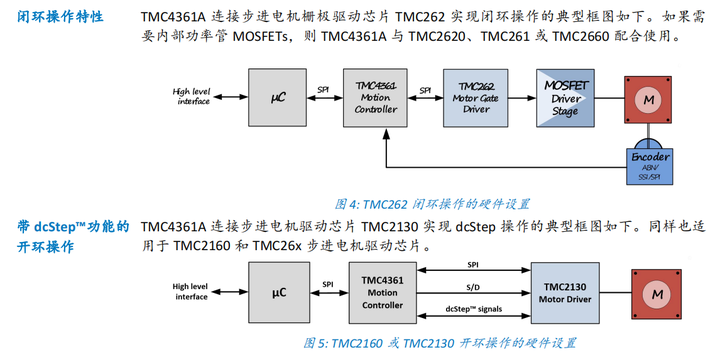
ᘌ����M(j��n)늙C�G���Ć�(w��n)�}��Trinamic�Ƴ���TMC5160늙C��(d��ng)оƬ��DcStep���ܿ�����Ч��ֹ늙C�G����
TMC5160��DcStep���ܽ�B��
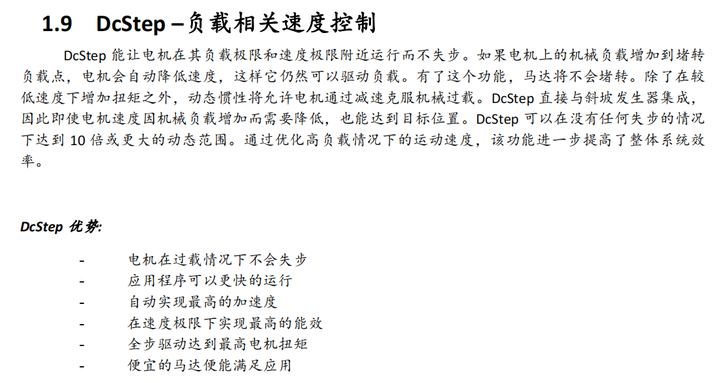
DcStep ��늙C����ؓ�d�O���ٶȘO�����\�ж���ʧ�������늙C�ϵęCеؓ�d���ӵ����Dؓ�d�c(di��n)��늙C��(hu�� )�Ԅ�(d��ng)�����ٶ����@������Ȼ������(d��ng)ؓ�d��
�����@��(g��)������늙C������(hu�� )���D���������^���ٶ�������Ť��֮������(d��ng)�B(t��i)�T�Ԍ����S늙Cͨ�^(gu��)�p�ٿ˷��Cе�^(gu��)�d��
DcStep ֱ���cб�°l(f��)������������˼�ʹ늙C�ٶ���Cеؓ�d���Ӷ���Ҫ������Ҳ���_��Ŀ��λ����
DcStep �����ڛ](m��i)���κ�ʧ������r���_�� 10 �������Ą�(d��ng)�B(t��i)������ͨ�^(gu��)��(y��u)����ؓ�d��r�µ��\��(d��ng)�ٶ���ԓ�����M(j��n)һ����������wϵ�yЧ����
DcStep ��(y��u)��:
늙C���^(gu��)�d��r�²���(hu�� )ʧ��
���ó�����Ը�����\��
�Ԅ�(d��ng)��(sh��)�F��ߵļ��ٶ�
���ٶȘO����(sh��)�F��ߵ���Ч
ȫ����(d��ng)�_�����늙CŤ��
���H�����TMC5160߀�ṩ��һ��(g��)����ʽ���a���ӿ���

TMC5160 ���ⲿ�������a���ṩ���a���ӿ������a�����H����ʧ�����Д���߀�Ɍ�(sh��)�F�\��(d��ng)�������Ěw�㹦��(��������_(k��i)�P(gu��n))��
�ɾ����A���l���Ĵ����O���˾��a���ֱ������m��늙C�ֱ������Ȳ����� 32 λ���a��Ӌ������
�����λ��Ҫ��dz��ߵđ��������²��M(j��n)늙C�G�����Ǿͽ��h���]�h(hu��n)���M(j��n)����
ᘌ����M(j��n)�]�h(hu��n)������Trinamic�Ƴ���һ�S�ͼӜp������(xi��n)�Ŀ���оƬ---TMC4361��
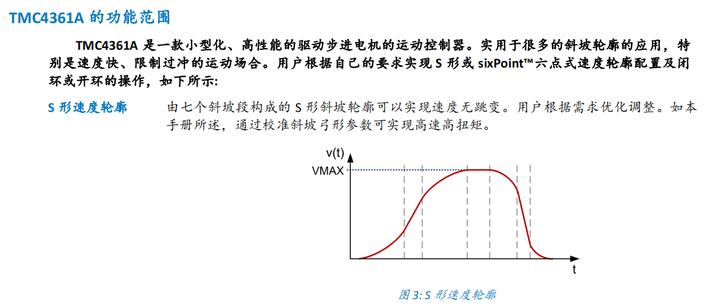
��֧�� sixPoint ���c(di��n)ʽб�����M(j��n)���˸��ك�(y��u)����֧�ք�(d��ng)�B(t��i)���\��(d��ng)������ TMC4361A ���� SPI �ӿ���Step/Dir �ӿڼ��]�h(hu��n)����ľ��a���ӿ���