���ߣ�Rajesh Mahapatra�����������(j��ng)��
Anil Sripadarao�������ϯ���̎�
Swastik Mahapatra���������̎�
ADI��˾
ժҪ
�����ڳ�ɫ�����Ӌ��ͼt��(IR)������������w�Еr(sh��)�g(TOF)�z���^�ڹ��I(y��)�� ...
���ߣ����݃x��
�S��(zh��)����I(y��)���Ԅ�(d��ng)���̶Ȳ��������������Լ����M���ڼ��а��b�@Щ�Ԅ�(d��ng)��ϵ�y������C�����Ј�(ch��ng)���^�m���L(ch��ng)������˾�����_(k��i)ʼ���乤�S(ch��ng)�͂}���Ќ�(sh��)�F����ϵ�y���Ԅ�(d��ng)����������m��δ��(l��i)�C�����c���(l��i) ...
ِ�`˼ᘌ�߅���Ј�(ch��ng)�Ƴ���Versal AI Edgeϵ�Юa(ch��n)Ʒ���ԓ�a(ch��n)Ʒ��һ�����m��SoC���������7nm Versal�ܘ����������������һ���ֲ�ʽ����ϵ�y��ȫ����߿ɔUչ�����`�׃�Įa(ch��n)Ʒ�M���������
�����_ XCVE1752-1 ...
��(l��i)Դ��DigiKey
�˹����ܣ�AI���ѽ�(j��ng)�Ǯ�ǰ�Ƽ��I(y��)����T(m��n)��Ԓ(hu��)�}����������䑪�����漰���(l��i)����ĸ���(g��)�I(l��ng)����������ڸ���(g��)�a(ch��n)�I(y��)������(l��i)�ஔ��Ҫ��Ӱ���������Ҽ�����׃���(l��i)δ��(l��i)�l(f��)չ�ķ��������������Č�������B�c ...
�Cе������Խ�ľ���������������ܻ�ˮƽ��Ч����������������V�������ڹ��I(y��)���������������}������t�����g(sh��)�ȶ���(g��)�I(l��ng)������������������ڙCе�۸�Ч�\�еı������������I(y��)���B�����ڱ����O�䷀���\�з���l(f��)�]��(zh��)��Ҫ ...
���ߣ�Sarvesh Pimpalkar������ADIϵ�y���ù��̎�
ժҪ
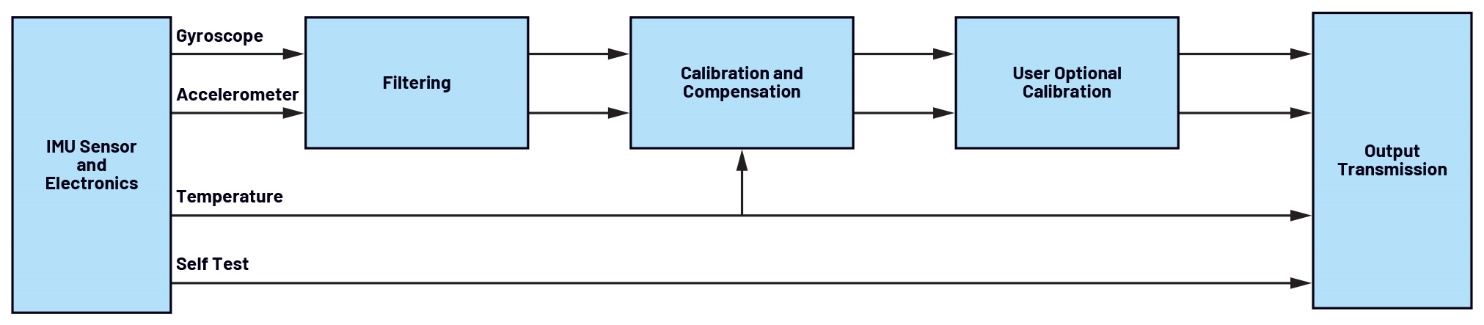
�������c(di��n)��B�ˑT�Ԝy����Ԫ(IMU)���������ڙC���˶�λ����Ҫ��������������������Ҫ��(y��u)�c(di��n)�������IMU���ṩ�P(gu��n)�I���\��(d��ng)��������ѳɞ�C���˾��_��λ ...
һ������p���a���������P(gu��n)��ģ�M�ǙC�����P(gu��n)������ϵ�y�еĺ��ĽM����������Q���˙C���˵��\��(d��ng)�����c��(d��ng)�����ʶ���������P(gu��n)��ģ�M���������λ�÷������`��У���Ǵ_�����_�\��(d��ng)���P(gu��n)�I��������p���a���OӋ���Ǟ�˶��OӋ�� ...
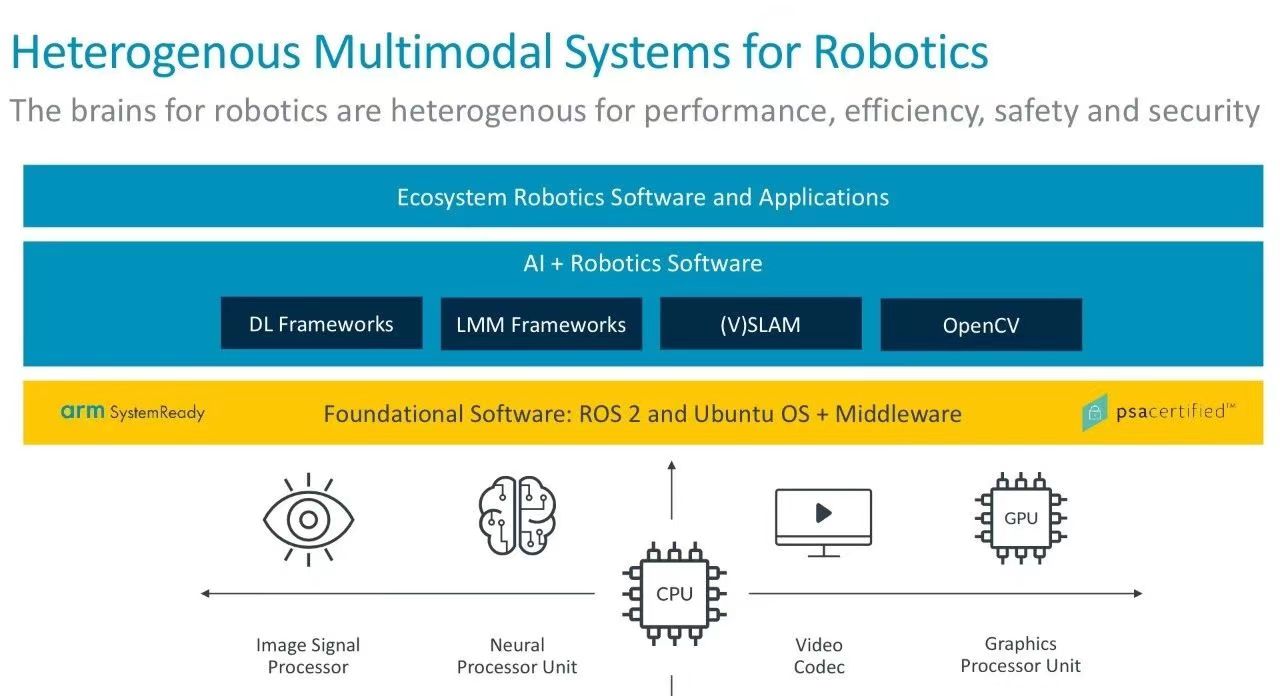
���ߣ�Arm ��(li��n)�W(w��ng)�I(y��)���I(y��)��(w��)��չ������ �R��
�� (t��ng)�^(gu��)Ī���S���Փ (Moravec's paradox) �������ԓ�Փָ����������˹����� (AI) ϵ�y��������������ֻ��dz��ٵ�Ӌ��������������(sh��)�F���(l��i)���Ԟ鳣�ĸ� ...
�S��(zh��)�坍��Դ���g(sh��)�Ŀ��ٰl(f��)չ������(d��ng)��ȼ��늳�����һ�N��Ч������h(hu��n)������Դ��Q�����������u�ڸ���(g��)�I(l��ng)��չ�F�����đ��Ý��������ں����I(l��ng)��������(d��ng)��ȼ��늳��w�C����δ��(l��i)�Gɫ���յ���Ҫ������������ܲ� ...
2024��10��23�� 09:29
��(l��i)Դ���Q�����
늙C�ǙC���ˈ�����ϵ�y���P(gu��n)�I�������ؓ؟�C���˵��Ƅ�(d��ng)�Ϳ�������������늴�ԭ���������늙C�Ɍ�����D����Cе����������Ķ���C���˵������\��(d��ng)�ṩ��(d��ng)�������F��������C���˿�����ɏĺ�(ji��n)�ε�݆�� ...
���D���I��һ�N�Cе����(d��ng)����������Y���˻��I�S�͝L��z�U�Ĺ������c(di��n)�����Ҫ�ɻ��I�S�������L����������I�ȽM��������ͨ�^(gu��)�L���ڻ��I�S�ͻ��I��֮�g�ĝL��(d��ng)��(l��i)��(sh��)�F���D�\��(d��ng)��ֱ��(xi��n)�\��(d��ng)�Ă��f����������Ԅ�(d��ng)�������а� ...
�f(xi��)���C���˵��τ�(d��ng)ʾ����һ�N��(ji��n)���C���˾��̵ķ��������ͨ�^(gu��)���(l��i)�����Tֱ�������C�����M(j��n)���΄�(w��)��������������o(w��)���M(j��n)�Џ��s�ľ�������������P(gu��n)�څf(xi��)���C�����τ�(d��ng)ʾ�̵�Ԕ�����?zhu��n)��τ?d��ng)ʾ����һ�Nֱ�^(gu��n)���Ñ�(h��)�Ѻ� ...
2024��09��25�� 14:17